
Connect left shoulder () right shoulder () left hand () right hand () block is a stack block available in Humanoid Robot extension for evive and other Arduino boards. This block defines the PWM pins to which all the four servos of arms(2 servos of shoulders + 2 servos of hands) are connected.
Input Parameters
All the drop-down are to select the channels to which the servos are connected. By default, the values are set to 6, 7, 8, and 9.

Note: This block is available in both Stage and Upload mode.
Example
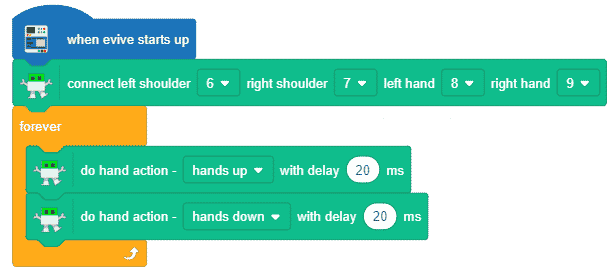
Here, in the given script, the humanoid robot will throw his hands up in the air and then bring it down.
- Define PWM pins for the servos connected.
- The humanoid robot will continuously put its hands up in the air and then bring it down.
Note: Before working with the Humanoid Robot, we need to calibrate the hands such that they are straight and calibrate the legs in such a way that they are facing forward.




