










Get current position in () axis block is a stack block available in Robotic Arm extension for evive and other Arduino boards. This block reports the current position of the end effector in the selected axis.
Input Parameters
- Drop down to choose between X, Y, and Z axis.

Note: This block is available in both Stage and Upload mode.
Example
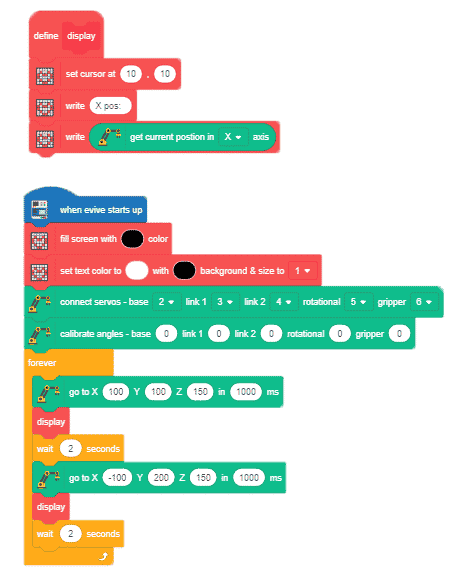
In this script, we will make displaying the current position of the end effector on evive’s screen.
- Define PWM pins for the servos connected.
- Using the hit and trial method, calibrate the robotic arm so that all the 5 servos are connected perfectly.
- The robotic arm moves to a specified position and the value of its X-axis is displayed on evive’s screen.