











Go to () in () axis in () ms block is a stack block available in Robotic Arm extension for evive and other Arduino boards. The block sets the end-effector to the specified position on the selected axis and the other two positions remain the same.
Input Parameters
- Specific coordinate you want to go to.
- Drop down to choose between X, Y, and Z axis.,
- Time to complete the reached the specified position.

Note: This block is available in both Stage and Upload mode.
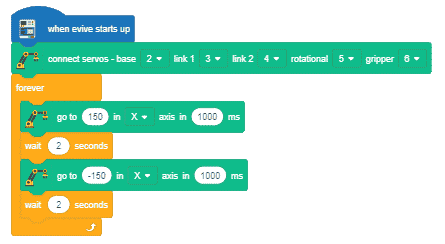
Example
In this script, we will make the robotic arm go one location wait there and again to the other location.
- Define PWM pins for the servos connected.
- The arm will continuously go to position 1 in the specified time wait for 2 seconds and then go to position 2 in the specified time.
Note: Before working with the Robotic Arm, we need to calibrate the robotic arm. To calibrate the robotic arm, click here.




