











Go to X () Y () Z () in () in line ms block is a stack block available in Robotic Arm extension for evive and other Arduino boards. This block moves the robotic arm’s end-effector to the specified X, Y and Z position in a line in the specified time. Whenever we use this block, the robotic arm breaks the line from one position to another position in smaller lines and follow them.
Input Parameters
- X-axis position for the robotic arm.
- Y-axis position for the robotic arm.
- Z-axis position for the robotic arm.
- Time to travel the entered position in ms.

Note: This block is available in both Stage and Upload mode.
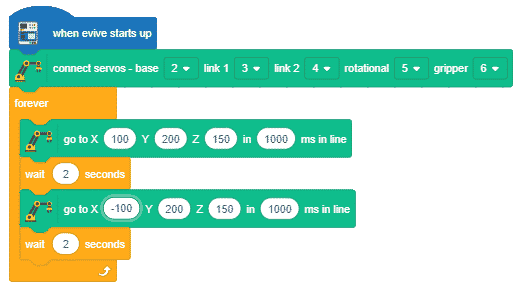
Example
In this script, we will make the robotic arm to first rotate clockwise and then from the same position rotate in the anti-clockwise direction.
- Define PWM pins for the servos connected.
- The arm will go to the first specified position by breaking its line in smaller parts and traveling through those lines. It will then go to the other specified position similarly.
Note: Before working with the Robotic Arm, we need to calibrate the robotic arm. To calibrate the robotic arm, click here.




