
Move () speed () moving size () block is a stacked block available in the Humanoid Robot extension for evive and other Arduino boards. This block is to assign pre-defined leg movements and actions to our Humanoid Robot.
Input Parameters
- Drop to select the type of action or movement.
- Drop down to choose the speed(very fast, fast, normal, slow, very slow) by which it will move.
- If you need your Humanoid Robot to move more steps, enter the higher value of moving size and vice-versa.

Note: This block is available in both Stage and Upload mode.
Predefines Actions
Forward
Backward
Turn Right
Turn Left
Up-Down
Moonwalker
Swing
Crusaito
Flapping
Shake Leg
Bend

Jitter
Example
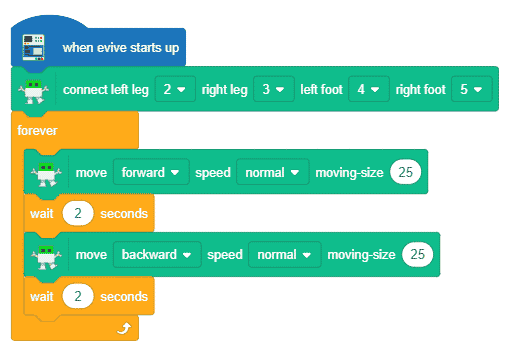
Here, in the given script, the humanoid robot will move forward and backward.
- Define PWM pins for the servos connected.
- The humanoid robot will continuously move forward with normal speed then wait and again move back with normal speed to its initial position i.e. from where it started moving.

Note: Before working with the Humanoid Robot, we need to calibrate the hands such that they are straight and calibrate the legs in such a way that they are facing forward.




