










Upload stage mode firmware is a stack block available in the Robotic Arm extension for evive and other Arduino Boards. To work in the stage mode, we have to upload firmware in evive which can communicate with PictoBlox in real-time. With the help of this block, we will use the upload stage mode firmware to the robot.
As we already know, the Stage mode is a mode of working in PictoBlox in which we can interact with evive, Arduino, and ESP32 in real-time. If you disconnect the board with Pictoblox, you cannot interact with the board anymore. As to calibrate the robotic arm we need to change what we make in the code affecting the robotic arm in real-time. Thus, we’ll be calibrating the robotic arm in stage mode.

Example
Here, to calibrate the robotic arm, we need to upload the stage mode firmware to evive.
- Open PictoBlox. Connect evive to the computer using the USB cable.
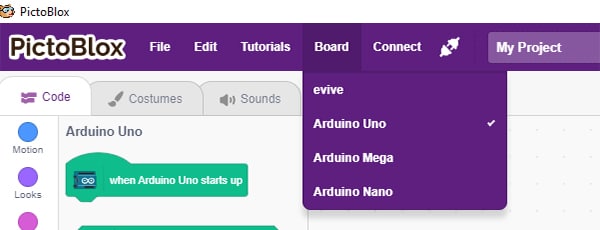
- Click on the board and select evive and then select the appropriate port.

- Now, to work with the robotic arm we need to add its extension. Click on the Add Extension button and add the Robotic Arm extension from the list.
- As we need to calibrate the robotic arm in real-time i.e. the Stage Mode, we first need to upload the stage mode firmware to it. Create a script with when evive starts up as the hat block and snap the upload stage mode firmware block below it.
- Switch to Upload mode by toggling the mode button.
- Then, click on the Upload Code button.
- Once uploaded successfully, switch back to the Stage Mode. Now, you’ll be able to communicate with the robotic arm in real-time and calibrate it.