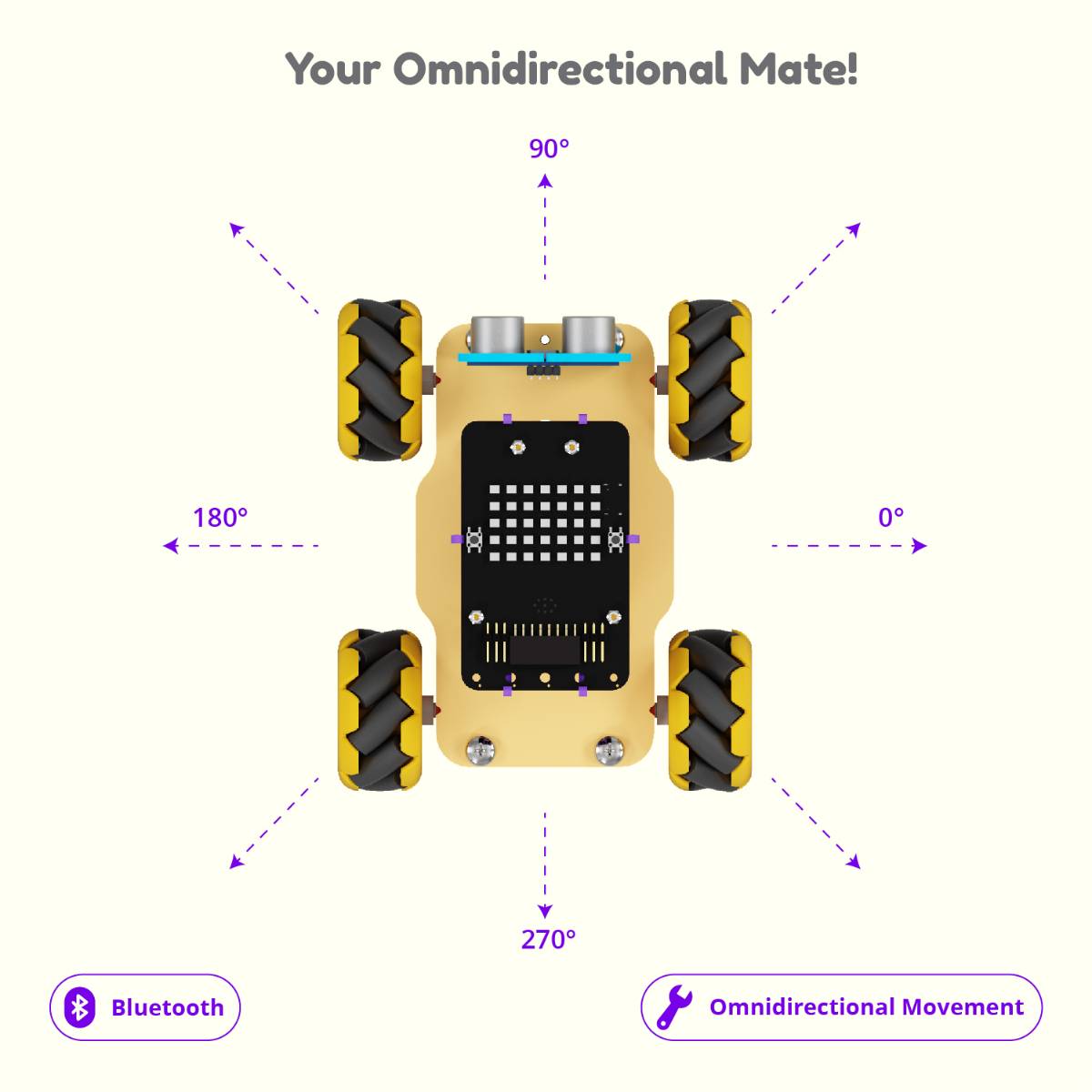







Quarky Addon kits are innovative do-it-yourself (DIY) kits that offer a wide variety of fields to explore, including Humanoid Robots, Mars Rover, Robotic Arm, Internet of Things, and more. Each kit comes fully equipped with all the necessary materials and instructions to create over 10 projects using coding, AI, and robotics. The opportunities to learn are endless.
There are two options available:
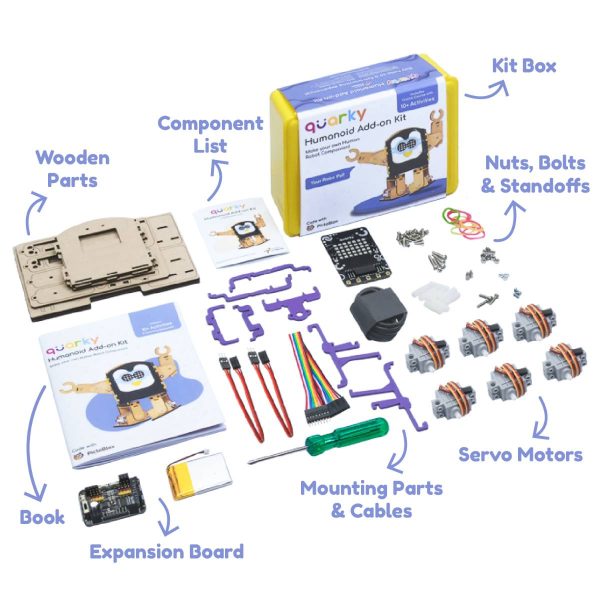
- With Quarky: In this option, you get a Quarky board with the kit. Qaurky is the brain of the Mecanum Robot and is required to run any project. So, if you do not have a Quarky board with you, then this is the right choice.
- Without Quarky: In this option, the Quarky board will not come with the kit. You will have to arrange or buy it separately to run the Mecanum Robot.
No, Quarky is an intuitive learning tool that is suitable for both novice and experienced coders. It is programmed using a graphical programming platform named PictoBlox which allows you to build your project by using Block Coding as well as Python. In addition, the interactive graphical programming interface adds fun to the learning and makes the whole experience even more immersive.
The kit includes a book and online resources to facilitate learning.
The kit is suitable for students aged 10 and up. Some students with a passionate interest in technology and learning have been able to create projects beyond their age range using the kit.
You can go through our online documentation for help:
- Quarky Mecanum Wheel Robot Documentation: https://ai.thestempedia.com/docs/quarky-mecanum-documentation/
- PictoBlox Mecanum Extension: https://ai.thestempedia.com/extension/quarky-mecanum/
If the problem persists, send us a video of the problem to support@thestempedia.com. We will reach out to you to resolve the problem.
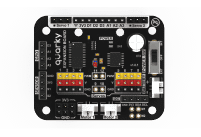
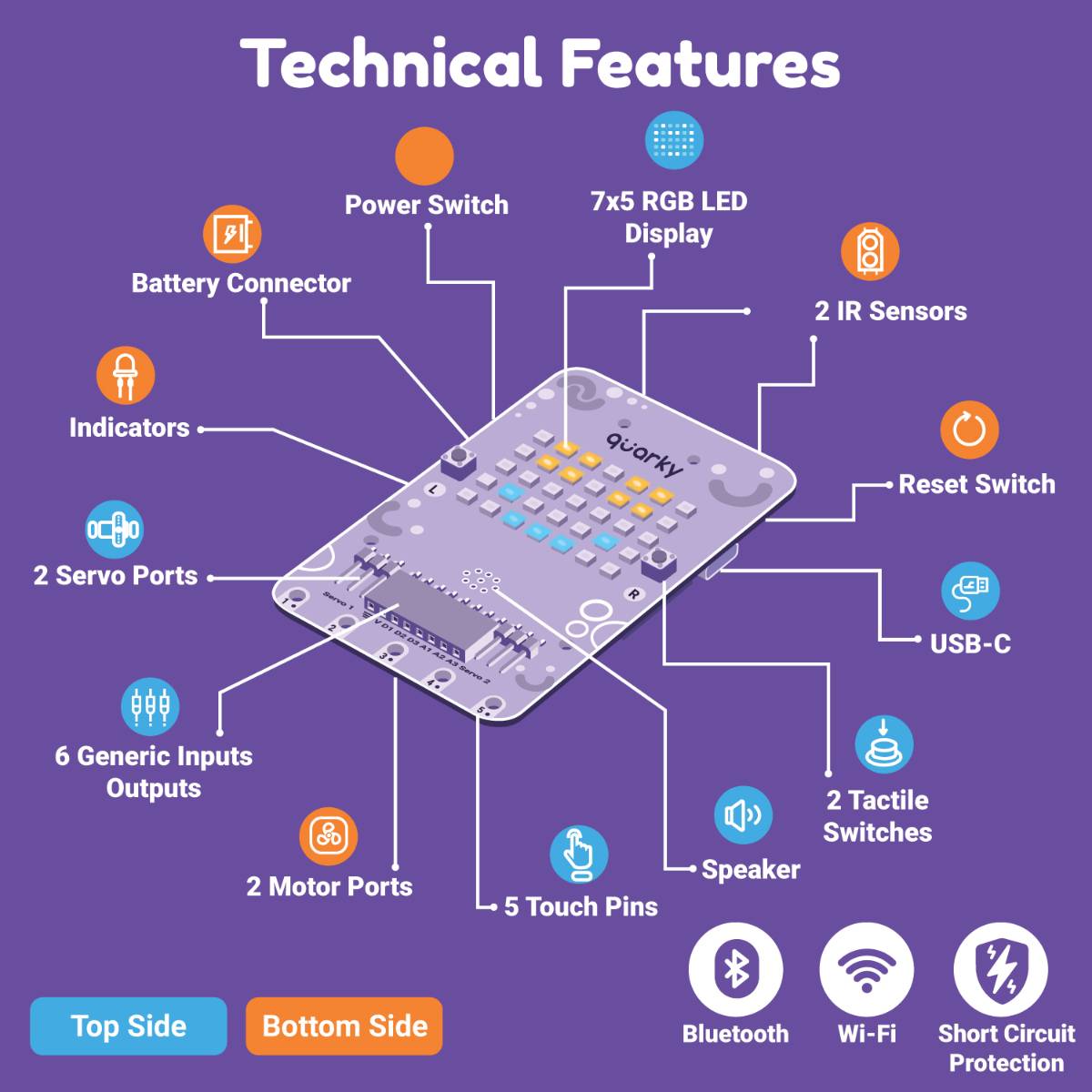
Quarky is a powerful, portable device that allows users to create complex projects with its 3.7V Li–ion battery support, two tactile switches, five capacitive touch sensors, two infrared sensors, and general–purpose input–output pins. It includes 35 programmable RGB LEDs in a 7×5 grid for creating animations, writing text, and displaying patterns, as well as a good-quality speaker for human-like audio or buzzing. Additionally, it has Wi–Fi and Bluetooth compatibility, and multipurpose input/output pins that can be used to interface with any third–party sensors. Quarky also has protections for reverse polarity, overvoltage, and overcurrent.
You can use the book or go to our learning resources here: https://ai.thestempedia.com/docs/quarky-mecanum-documentation/
To make a project you have to follow these essential steps:
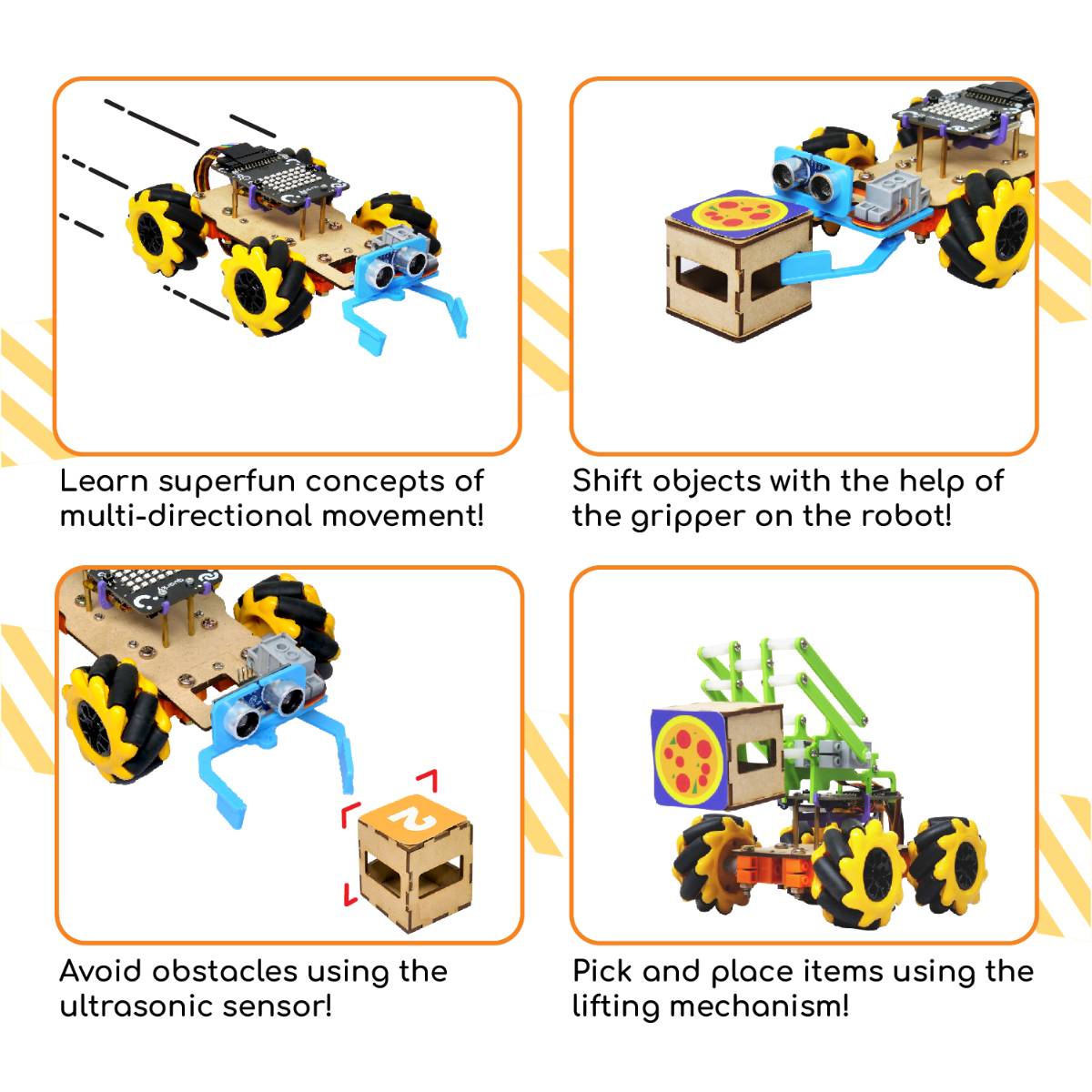
- Assembling Basic Quarky Mecanum Wheel Robot
- Assembling the Quarky Mecanum Wheel Robot with Gripper
- Assembling the Pick and Place Quarky Mecanum Wheel Robot
- Start Programming with Block Coding or Python Coding.
If you face any issues contact us for support here: support@thestempedia.com
The robot uses the battery that comes with it. Don’t use any other batteries for this robot.
To charge the robot, simply plug in the USB cable to a laptop or adapter and connect it to the designated port on the Quarky board. Make sure the power switch on the robot itself is turned on.
PictoBlox allows users to code Quarky Mecanum Robot with Block Coding. You can follow these instructions:
- Follow the steps below for connecting Quarky to PictoBlox on a Laptop:
- First, connect Quarky to your Laptop using a USB cable.
- Next, open PictoBlox and select Block Coding as your coding environment.
- Then, click the Board button in the toolbar and select Quarky.
- Next, select the appropriate Serial port if the Quarky is connected via USB or the Bluetooth Port if you want to connect Quarky via Bluetooth and press Connect.
- Follow the steps below for connecting Quarky to PictoBlox on a Mobile or Tab:
- First, power ON Quarky.
- Open PictoBlox on your smartphone. Go to My Space and make a new project by clicking the ‘+(plus)’ button in the bottom-right corner.
- Then, tap the Board button in the top-right corner of the toolbar. Select board as Quarky.
- Next, tap the Connect button. Select your device from the list.
- Click on the Add Extension button and add the Quarky Mecanum Robot extension.
- You can find the Quarky Mecanum Robot blocks available in the project.
You can find the detailed tutorial here: https://ai.thestempedia.com/docs/quarky-mecanum-documentation/programming-the-mecanum-robot-with-block-coding-in-pictoblox/
PictoBlox lets you code the Quarky Mecanum Robot using Python. Python is currently available on Windows, MacOS, Linux, and the web version only. It’s not yet available on smartphones, but it will be coming soon.
Follow the steps:
- Connect Quarky to your laptop with a USB cable.
- Open PictoBlox and select Python Coding as the coding environment.
- Select the board as Quarky and click Connect.
- Next, select the appropriate Serial port if the Quarky is connected via USB or the Bluetooth Port if you want to connect Quarky via Bluetooth and press Connect.
- To enable interaction with the board in real-time, use the following object declaration in Python: meca = Mecanum(1, 2, 7, 8).
- To enable the program to run offline and allow Quarky to run without the computer, use the following object declaration in Python:
from quarky import *
from expansion_addon import Mecanum
meca = Mecanum(1, 2, 7, 8)
For detailed instructions, visit https://ai.thestempedia.com/docs/quarky-mecanum-documentation/programming-the-quarky-mecanum-with-python-in-pictoblox/.
You can either use chapter 2 of the book or follow this tutorial: https://ai.thestempedia.com/docs/quarky-mecanum-documentation/assembling-basic-quarky-mecanum-wheel-robot/